 English
English 
Views: 192 Author: Site Editor Publish Time: 2019-08-19 Origin: Site









In the development of beyond-line-of-sight (BLOS) Unmanned Aerial Vehicle (UAV) systems, communication between the UAVs and the ground control station (GCS) is of critical importance. The commonly used 5.8G or 2.4Ghz economical wireless modules are restricted by the short communication range and are easily blocked by obstacles and interferenced by wifi signal around. The use of a communication 800Mhz or 1.4G system provides a practical way to solve these problems, improving the performance of UAV communication in BLOS and cross-obstacle operations. In this study, a quadrotor was used to take the 800Mhz and 1.4Ghz communication system FPM-8416 transmitter to communication with ground and send send that it get from camera to pilot.
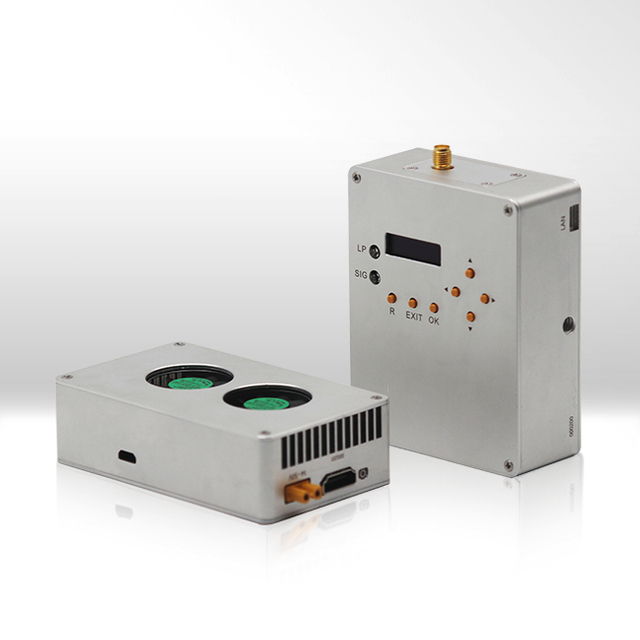
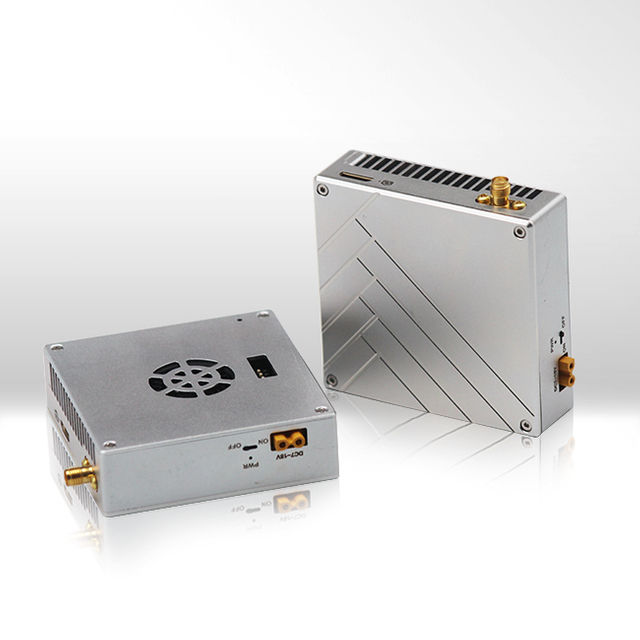
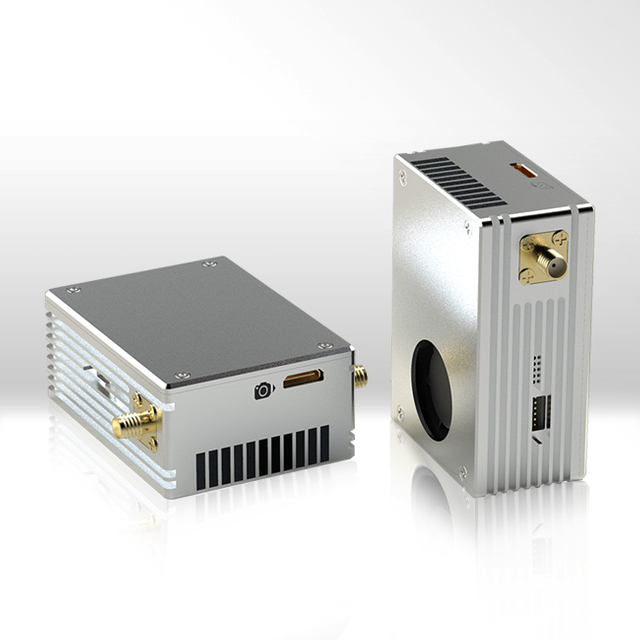
FIM-8416 is a model for 14-16km drone video and Telemetry transmitter with 800Mhz and 1.4Ghz frequency option. Its double antennas design for stable signal sending.
Time: 2019.05.11
GCS Location
Lat: 28.099992°
Lon: 112.943713°

Purpose of Testing is to:
Verify the performance of FPM-8416
Test the actual distance that FPM-8416 can support
Verify the stability of FPM-8416 with 800Mhz and 1.4Ghz
Test the Rx antennas performance
Accumulate experience for practical application.
Optimize parameter configuration to improve performance according to the testing result.
Equipment Involved In The Testing:
FPM-8416 Tx*1
FPM-8416 Rx*1
800Mhz 2dbi Tx omni antenna*2
1400Mhz 2.5dbi Tx Omni Antenna*2
800Mhz 8dbi Tx omni antenna*2
1400Mhz 8dbi Tx Omni Antenna*2
Go pro Camera*1
lifting poker*4
Quadrotor*1
PC*1
Content:

1. Tx Connect with double antennas and go pro camera
2. Power the Tx and Camera
3. Rx Connect with double Rx antennas and PC
4. Power the Rx by Ethernet Cable
FPM-8416 Transmitter Antenna Installed On UAV

Firstly built up the quadrotor and the transmitter of FPM-8416 communication system. Second, a set of software programs and protocol for autonomous mission control, communication control, and ground control were developed. Finally, the system was fully integrated into the airborne platform and tested both indoor and in-flight. The Received Signal Strength Indication (RSSI) and noise value in two typical application scenarios were recorded. The test results demonstrated the ability of this system to extend the communication range.
GCS with double omni fiberglass antenna

After make sure all the system are working smoothly and Tx and Rx are communicating with other normally, the drone took off and sent the camera’s video smoothly to receiver on GCS and displayed on the monitor as right figure:
Video Sent Back From Quadrotor

Remote Controller
Aircraft: This is a Six-rotor uav consisting of structural components, power system and battery. In this test, we selected quadrotor for its easily lunch ability. Communication systems, however, are not limited to quadrotors and can be integrated into any desired airborne platform such as fixed wing UAV for long endurance and distance service.
Flight Controller: In this test system, Pixhawk kit was selected as the main flight controller. It provides attitude and position control for the UAVs and it also has an internal IMU, barometer and external GPS flight control.
Ground Control Station: We use a Laptop with a GCS software based windows to send commands to the quadrotor and monitor its status.
Camera: In the test, we use go pro hero 5 black for collecting clear footage in the air.
Emergency Remote Controller: The remote controller is connected to the flight controller via 2.4 GHz wireless communication. In normal operation, all the commands and status can be set by the GSC point. This device has switch to directly takeover the control of UAVs in case of emergency situation in the debugging process.
Communication Module: wireless radio communications(FPM-8416) consists of radio transceivers and antennas. The paired modules connect automatically and transmit Telemetry and FHD video to GCS.

HDMI interface on Tx and Rx for FHD video input and output
Screw hole for fixed on board

Both LAN ports on Tx and Rx supports UDP/TCP signal sending
Serial port for TTL or RS232 command data transmission
With the deepening development of modern beyond-line-of-sight (BLOS) Drone reforms, The use of unmanned aerial vehicle (UAV) to capture image information has become an important means of reconnaissance in different outdoor activities and plays an irreplaceable role. This require the wireless image transmission system has features of supporting longer range, More stable working and Higher sensitivity. The model FPM-8416 is a better choice. More details, please check the website