 English
English 
Views: 47 Author: Site Editor Publish Time: 2019-07-28 Origin: Site









Purpose of presentation
Provide a fundamental understanding of UAV’s Applications in traffic, UAV’s FPV System and how they can operate Safely and Effectively in Transportation Projects.
Content List:
Background
System Design
UAV
FPV System
Ground Control Station
Conclusion
Traffic monitoring is important in urban areas. Traffic sensing solutions based on static cameras, however, do not offer a flexible, inexpensive solution for short-term traffic studies. To overcome the limitations of static solutions, since 2013, more and more transportation departments have been using drones to conduct high-altitude surveillance and patrol enforcement on the road traffic.

The red circle marked area in FIG 1 is a traffic hotspot according to YANG, a Quality Control Manager with the Ministry of Transport based in Shenzhen. In this area, on the left there is a tunnel and near the tunnel there is a scenic spot with big visitors flow each days. The crossing is also an important transport hub to travel in Shenzhen. Therefore this area has big vehicle flow and very easy to take place traffic accident. Their current traffic monitoring techniques adopt intrusive static sensors in the form of inductive loop detectors, infrared (IR) detectors and radar guns. Visual monitoring is often done manually, with the operator watching hours of video footage while counting the cars as they pass through an area. Two of the significant problems associated with the above-mentioned techniques, is that they are time-consuming. In order to monitor traffic with high accuracy and flexibility, the Transport Ministry decide to use a drone system.

The system consists of three parts: UAV, Radio links for data transmission and
Ground Control Station for data processing.
Traffic Flow Control
HD camera on board automatically collects road condition information
The video or data collected by drones transmitted to GCS by the long-distance FPV system.
The flight control system implements autonomous flight
3-axis suspension flight head, which can be equipped with visible light, infrared, and other airborne equipment. The pan tilt has grid axis stability and automatic correction function.
Flight Control System
The UAV combines GPS, 6-DOF inertial measurement unit, magnetic field meter, barometric altimeter and other sensor units,optimizes the theoretical model of robotic control such as high robustness H infinity algorithm and expert system and provides high stability and reliability flight control core module to make the drone system a fully automated aerial work platform.
Multiple flight control modes offer the possibility to work in different environments. Precise height locking and smooth posture balance are maintained in attitude mode. When the drone machine loses the remote control signal, it can automatically hover. After more than 10 seconds, the flight control system calculates the best route for returning and directs the drone to return safely. Accurate hovering, even in windy weather, the accuracy of the hover will not be affected.
Vehicles information Collection

Several parameters can be observed and measured according to the vehicles that are deployed over the coverage area: vehicle position, speed, and direction, the number of vehicles within an area, the number of vehicles passing through a given point (a gate, an intersection, a crossing). Specific events can be detected through value changes of the above mentioned parameters. For instance, speeding can be detected when the speed of a vehicle exceeds a given limit. On the other hand, traffic jams can be detected when the speed of several vehicles falls below a given threshold.
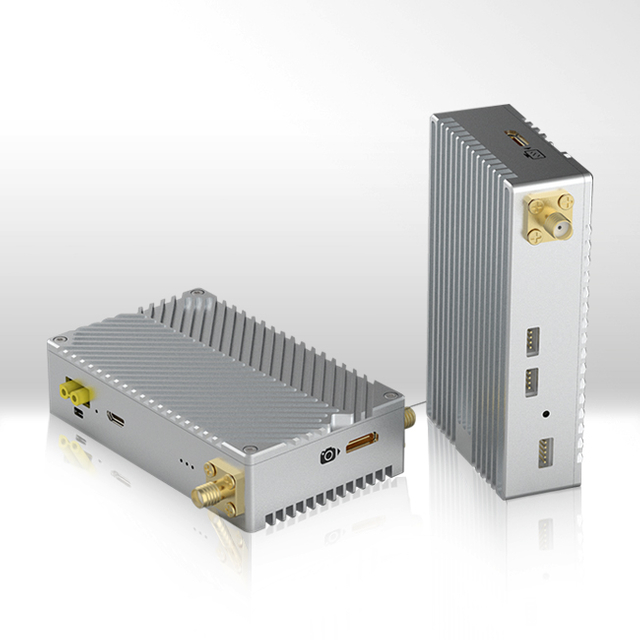
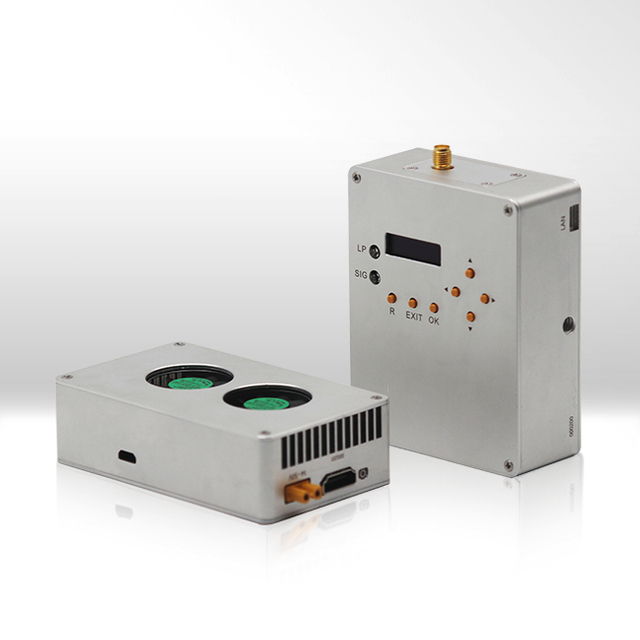
FIM-2410 is a mini HD Video and Data transmission COFDM system for UAV Offering HDMI video, TCP/UDP Signal & TTL Bi-directional Data Transmission in 1 RF channel. It develops CABAC (h.264) coding & decoding technology to achieve Utra-high resolution(1080P), long distance(air to ground 12km) and low delay(30-50ms) transmission. The system also supports two-way(data & image) communication, adjustable video resolution and bit rate output with the TPlayer software. It can realize the soft decoding with low delay to output Rx video to PC.

Image Processing
1. High-stability and high-sensitivity FPV circuit design for stable and high quality image obtain.
2. Each frame is encoded to nearly same size so that there is no additional latency in wireless channel caused by large I frame.
3. CABAC entropy encoding and high compression rate to guarantee high video quality at low bit rate

TDD-COFDM wireless video data links advantages:
1. Long range transmission distance 8-12km
2. Delay time very short less than 25ms
3. Perfect image quality, brighter colors and image smoothness
4. Micro and lightweight less than 100g
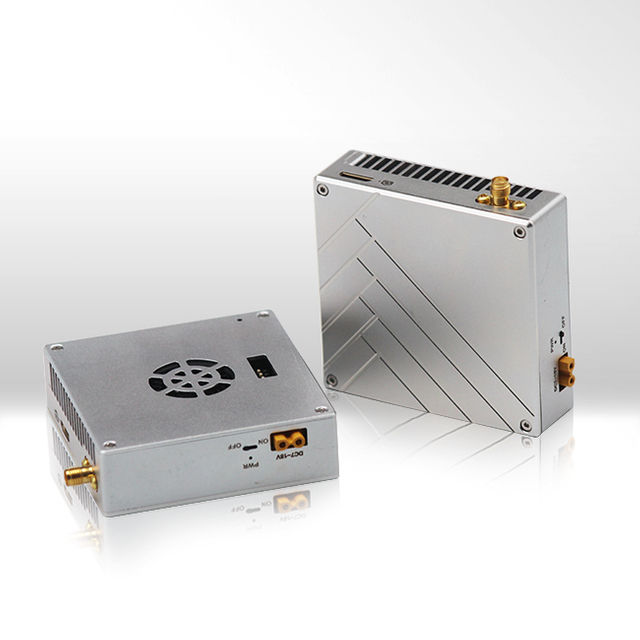
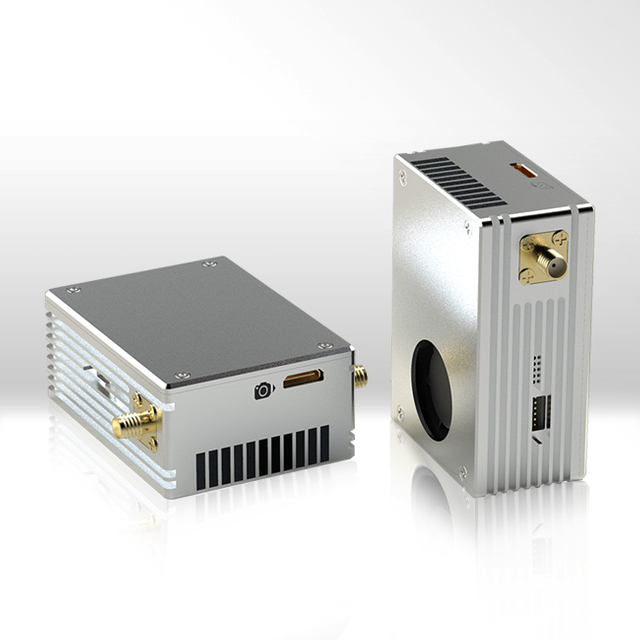
System Key Features
Low delay time less than 30ms
Lightweight, 93g net weight only
Small size
8km to 12km LOS distance on air
High quality and cost COFDM video transmitter
Aluminum-unibody housings featured, good impact resistance and heat dissipation
Special design for economical drone
The ground control station (GCS) is a flexible and universal solution for controlling unmanned vehicles and payloads. By using a unique, modular electronics compartment (MEC), application-specific hardware can be quickly installed. This flexibility allows the GCS to be configured to control  unmanned aircraft vehicles (UAV), ground robots, bomb-disposal robots, remotely operated vehicles (ROV), and other robotic devices. The GCS can also be configured to control and monitor measurement and sensing equipment.
unmanned aircraft vehicles (UAV), ground robots, bomb-disposal robots, remotely operated vehicles (ROV), and other robotic devices. The GCS can also be configured to control and monitor measurement and sensing equipment.

Two hot-swappable lithium batteries
User-dedicated modular electronics compartment
Two 12V power outputs for datalinks
Comprehensive set of connections
Super bright 17” and 13” touch-screen displays
10−32 VDC input rangeIntuitive power monitoring display
Overvoltage, overcurrent, reverse polarity protection
Battery overdischarge protection
User-serviceable fuses
Removable CORDURA bag for accessories
Carry handles, wheels, and shoulder strap for convenient transportation
Ruggedized and lightweight design
Unmanned Aerial Vehicles (UAVs) are becoming anattractive solution for road traffic monitoring because of their mobility, low cost, and broad view range. We suggest a monitoring systems based on UAV to extract information about vehicles and track of moving points in the UAV field of view. Also we generate UAVs. UAVs monitoring the traffic on a city road are responsible for collecting and sending, in real time, vehicle information to a traffic processing center for traffic regulation purposes. We show that the performance of our system is better than the performance of the fixed CCTV camera traffic monitoring system in terms of coverage rates and events detection rates.